
|
Stepper
Stepper 2
|
| Description | Stepper 2
|
| Availability |
|
| savvy-SFD Graphic | 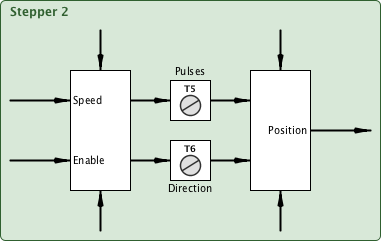 |
| Graphic with Parameters | 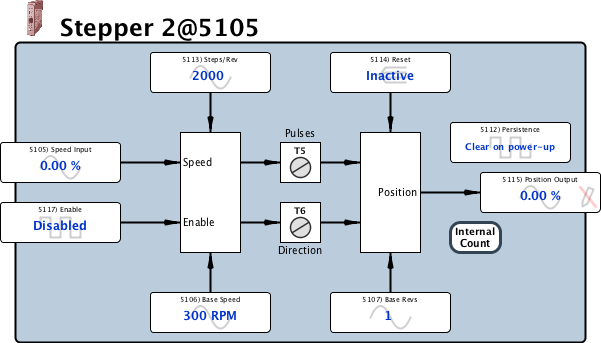 |
| Speed Input |
Input, Read-write, Analog (signed 16-bit integer) -327.67 % to 327.67 % Stepper 2 - Speed Input
|
| Base Speed |
Input, Read-write, Analog (signed 16-bit integer) -32767 RPM to 32767 RPM Stepper 2 - Base Speed
|
| Base Revs |
Input, Read-write, Analog (unsigned 16-bit integer) 1 to 65535 Stepper 2 - Base Revs
|
| Count 0 |
Internal Parameter, Read-only, Hexadecimal (unsigned 16-bit integer) 0 to 65535 |
| Count 1 |
Internal Parameter, Read-only, Hexadecimal (unsigned 16-bit integer) 0 to 65535 |
| Count 2 |
Internal Parameter, Read-only, Hexadecimal (unsigned 16-bit integer) 0 to 65535 |
| Count 3 |
Internal Parameter, Read-only, Hexadecimal (unsigned 16-bit integer) 0 to 65535 |
| Persistence |
Internal Parameter, Read-write, Boolean (signed 16-bit integer) The Persistence parameter defines the behavior of the 64-bit internal count when the moduleis powered down. By default the internal count is reset to zero at power-up. If you would like thevalue to be stored at power down, change to Persistent. 0 = Clear on power-up 1 = Persistent |
| Steps/Rev |
Input, Read-write, Analog (signed 16-bit integer) 100 to 32767 Stepper 2 - Steps/Rev
|
| Reset |
Input, Read-write, Enumerated (signed 16-bit integer) Stepper 2 - Reset
0 = Inactive 1 = Reset 2 = Auto-Reset (T8) |
| Position Output |
Output, Read-only, Analog (signed 16-bit integer) -327.67 % to 327.67 % Stepper 2 - Position Output
-32767 = - overrange 32767 = + overrange |
| Enable |
Input, Read-write, Boolean (signed 16-bit integer) Stepper 2 - Enable
0 = Disabled 1 = Enabled |